Composed Controls Considered Harmful?
Back in 2006 I was very interested in speeding up Linux networking. I was working at a VoIP provider that was majorly underfunded because of the regulatory uncertainty around VoIP at the time. The bad part of the situation was that we didn’t have money to buy the shiny VoIP equipment from the vendors. The good part was that I got to write a lot of software that had to be as fault tolerant as any human could make it. It also meant that we ran everything on either Linux or FreeBSD and so I worked hard to squeeze all of the available performance out of those platforms. I was also particularly interested in Linux networking because I had spent a lot of effort up to that time on crazy things in High Performance computing on Beowulf clusters.
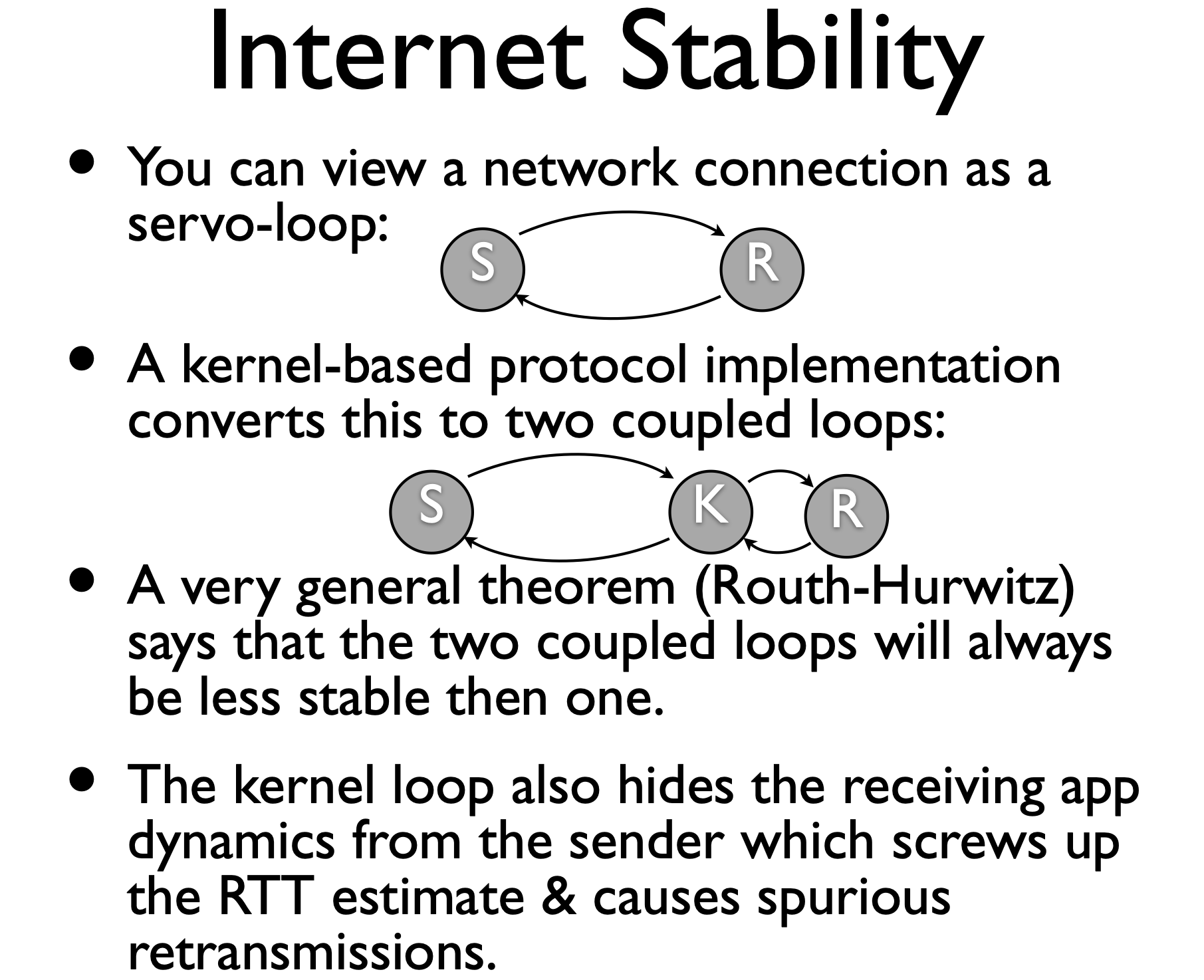
I also used to read LWN, so I was really excited when this popped up: Van Jacobson’s network channels. The channels themselves were neat, and worthy of a talking about in the context of today’s IOVisor and the like, but what I really got excited about in his slides was this, on page 9:
I thought this was a very novel way of thinking about composing systems. At the time I was still a physics-person becoming a computing-person, but I had studied some control theory during my days building particle accelerators. Still, I had no idea what this meant: it just seemed cool. In what follows, I will explain how I understand what he meant. Note that I don’t know him and I’ve never spoken with him about this slide, so this is all in some sense a straw man. Still it’s interesting and there is something to say about why this might just be true.
I’m also quite sure that whatever fraction of the audience were actual control engineers were shaking their heads vigorously in disagreement if not choking on their own tongues. The statement that
A very general theorem (Routh-Hurwitz) says that two coupled loops will always be less stable than one.
is not only mathematically imprecise, but you’d be hard pressed to find a control systems engineer who would agree that is what the theorem states. Controls engineers as a rule aren’t afraid of systems with multiple interacting control loops. In fact they wouldn’t even be able to do their jobs if they were. Our world is full of many billions of wonderfully stable interacting controls. So what was he getting at? His statement might be common knowledge in some camps, but I can tell you that every control systems person I’ve ever discussed this with was unfamiliar with this characterization of the theorem. At any rate, let’s get back to why this intrigued me.
First off it’s important to know that “Routh-Hurwitz” can mean one two likely things in this context: The Routh-Hurwitz Theorem; and the related Routh-Hurwitz criterion. Expecting to find find a theorem about the stability of two-loop systems I excitedly started looking. Eventually I found myself staring at Gradshteyn and Ryzhik (does anyone even have these anymore?) §15.715. The Routh-Hurwitz theorem establishes a criterion by which all of the eigenvalues of a matrix \(\pmb{A}\), determined by the characteristic equation
have negatitve real parts if a specific sequence of values
are all be positive. The \(b_1, c_1, \dots\) are determined from various determinants formed from various coefficients of the sequence, and the overall number of them is determined by the value of \(n\). The \(f(n)\) get hairier and hairier as you go. But the essential and useful fact is that the number of sign changes of the sequence counts the number of poles with positive real parts. This is great to know if you are a theorist in the 21st century, or an engineer in the nineteenth (when the theorem was first proved), but you’re out of luck if you were expecting a theorem about two coupled systems.
Before getting back to the coefficients, let me cover why would we care about this in the context of control systems. A fundamental result of control theory is that the time-domain response of a system \(Y(t)\) can be determined by considering the overall system transfer function \(H(s)\) in the frequency domain. \(H(s)\) in this setting is a complex function and has poles at the at the characteristic frequencies of the system. Each of these poles are eigenvalues of the system that are associated with a component of the overall time-domain response
where the \(\lambda_j = a_j + i b_j\) are complex variables, and \(a_j\) and \(b_j\) are strictly real. If \(a > 0\) then the response grows exponentially in time. This is bad for system stability. On the other hand, if \(a < 0\), then this mode gradually decays as the overall system heads to steady-state. Note also that if \(b \neq 0\), then this mode causes the system to oscillate as well.
So in the interest of system stability we care about the real parts of the poles of \(H(s)\) being in the left half-plane. Studying these poles reduces to studying the roots of the denominator of \(H(s)\), which reduces to factoring the characteristic equation of \(H(s)\) which is nothing other than a polynomial representation of the denominator of \(H(s)\). (The zeros of \(H(s)\) are important too, but not for furthering our hand-waving exploration of the original topic). If this isn’t familliar to you, the Internet abounds in introductions to the topic. This course has some nice notes that explain it from the perspective of dynamical systems.
This takes us back to the Routh-Hurwitz theorem, which when applied to the characteristic equation of a system gives us the Routh-Hurwitz criterion, which is taught to everyone who studies control theory even though the technique was invented in the ninteenth century. Matlab has been calculating the poles of transfer functions as long as it’s been around.
At any rate, let’s get back to Jacobson’s characterization of the Routh-Hurwitz theorem. The characteristic equation is a polynomial in \(s\). The highest exponent of \(s\) is the order of the polynomial as well as the order of the system. One additional thing to know about transfer functions is that when you chain them in time, you multiply their transfer functions. This means that the characteristic equation of the overall system \(S = S_1 + S_2\) has \(O(S) = O(S_1) + O(S_2)\). This is important for understanding why coupled systems might be less stable than a single system.
Systems in nature and the systems we usually engineer are typically second order. The fascinating discipline of Mechanical-Electrial Analogies [Olson] provides a formalism under which electrical, mechanical, hydraulic, and acoustical systems can all be reduced to a circuit analysis using Kerchoff’s laws. These systems are all second-order.
I offer that most if not all of the modular blocks of our computing and networking systems are second order. I have two reasons to say this. First, our systems ring (i.e. display damped oscillations) in response to step impulses. Second, if you look at the above materials for the Mechanical-Electrial analogies, or any elementary textbook in controls theory, you will see that the essential properties of a second-order system are damping, energy storage and inertia. If you think of our server systems, or routers, or other of our modular blocks as queuing systems, you can immediately see the damping (tasks leave the queue eventually), and the energy storage (the queue itself).
To see the inertial aspect, think of water hammer in a house with old plumbing. When you turn on the water to stake a shower, then quickly shut off the valve, you sometimes hear a lound banging sound a few second later. This is because the energy that went into compressing the water and the plumbing sloshes around for a bit as a result of the boundary condition of zero flow. Now think of our systems. They clearly slosh around as well. Think of any overhead cost that lags the task: garbage collection, pipelined cache misses, control plane processing. Thus I argue that since our systems are inertial, exhibit energy storage via queueing, and they dampen, so by dynamical analogy they are second-order systems.
For Jacobson’s (supposed) argument it doesn’t really matter if we consider two composed second-order systems or four composed first-order systems. But let’s consider it settled for now that we have a second-order system of interest, say a server on the internet processing credit card transactions. Say we want to check the stability of our system with Routh-Hurwitz. The system will have a characteristic equation
The associated sequence for the Routh-Hurwitz theorem is
and so we see that so long as all of the \(a_i\) are positive, the system is unconditionally stable, in the sense that the eigenvalues all have negative real parts. However, if we chain this system to another first order system then the characteristic equation of our combined third-order systems becomes:
where the \(a'_i\) are products of the coefficients of the individual systems, and the associated sequence becomes
At \(n > 2\) we start to pick up terms from the determinants given by the theorem. So we see that a system which is a convolution of two unconditionally stable systems is conditionally stable depending on the values of the coefficients of the individual systems, specifically if \(a'_0 a'_3 > a'_1 a'_2\). It only gets worse as the order increases.
Control engineering is the discipline of optimizing the choices of system parameters. These parameters determine the \(a_i\). If you are building a system with coupled control loops, you don’t worry too much about the negative signs in the sequence because you specify all of the system parameters. But remember that Jacobson was talking about connecting two Linux kernels together over the Internet. This means that very likely, the system designer on one side has no idea what the parameters are of the intermediate systems. This in turn means that while in isolation her system is unconditionally stable and never tips over, the combined system will exhibit failure modes that make absolutely zero sense, either in the isolated contexts of each or of both.
We all know that our systems behave this way. This brings to mind a great paper from Boyd-Wickizer et. al. in 2012, where the authors modeled the Linux kernel ticket locks via Markov processes and demonstrate bizarre and sudden system performance collapse. Physicists might be tempted to call these kind of things phase transitions. While Boyd-Wickizer et. al. weren’t studying coupled controls, this is the kind of system behavior that I’m sure Jacobson had in mind in his slide.
Read more in Systems
Read more in …